
WELCOME TO MY WEBSITE Dr. Michael Vallance Ed.D, MSc., BSc(Hons), PGCE
VR SCENARIO 1
I am a Professor in the Department of Systems Information Science - Media Architecture at Future University Hakodate, Japan
Engineering Lab
VR SCENARIO 2
Solar power plant
VR SCENARIO 3
Fukushima nuclear power plant
CURRENT RESEARCH: The Proteus Effect in Engineering Virtual Reality. Funded by JSPS kakenhi no. 22K02949 (AY2022 ~ 2024).
The Research hypothesis: Physiological data provides quantitative metrics of success in extrasomatic virtual-to-real world task implementations.
Significance of the research: Determine significant episodes of participants engaged in extrasomatic collaborative immersive virtual reality and synchronized real-world engineering activities; known as the Proteus Effect.
Future University Hakodate (公立はこだて未来大学)
Dept. of Media Architecture (情報アーキテクチャ学科)
Information science (情報アーキテクチャ学科)
Anti-disciplinary education
Design | Make | Play
Quantitative metrics of learning
Say "Hello!" to Bob, our Subject Matter Expert.
Bob is an Artificial Intelligence (AI) Non-Player Character (NPC) located in our Virtual Reality (VR) Enginering Lab. Students can interact in natural spoken language with Bob. Made with Unity and InworldAI.
Say "Hello!" to Bob by clicking his image.
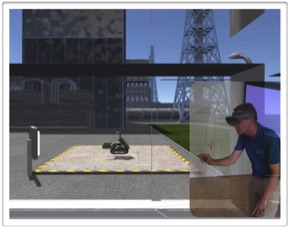
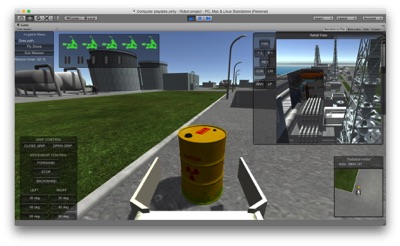

Figures show Fukushima Dai'ichi nuclear power plant disaster learnng activity in Virtual Reality (Oculus Rift HMD & Unity).
